
Researchers Identify a Novel Approach to Advancing Visual Place Recognition
Visual Place Recognition (VPR) is a vital process that involves determining the location where specific images were captured. Deep learning algorithms’ capabilities have significantly improved in recent times, allowing users to precisely identify the source of photos inside well-known locations.
Researchers at the Delft University of Technology (TU Delft) have developed a unique strategy to improve the performance of deep learning algorithms in VPR applications. An article published in the IEEE Transactions on Robotics describes their continuous place-descriptor regression (CoPR) technique, which has demonstrated encouraging results.
What Is VPR?
Visual Place Recognition (VPR) is an image-based localization technique, that determines the camera position of a query image using the most comparable reference image from a collection of geo-tagged reference images.
Recommended: Multi AI – Open-Source AI Platform for Web 3.0
Identifying Fundamental Bottlenecks
The first author of the article Mubariz Zaffar explains that the underlying limitation of VPR performance and associated visual localization techniques was the inspiration behind their investigation. One major issue they found is “perceptual aliasing,” in which various regions with identical visual appearances might cause incorrect matches in VPR. They also noted that the scarcity of reference photos reduces the precision of VPR systems. Their research is motivated by these bottlenecks.
![]() Extending VPR’s Paradigm
Extending VPR’s Paradigm
 Extending VPR’s Paradigm
Extending VPR’s ParadigmThe researchers questioned if VPR is only practicable when photos are gathered on every lane of a mapped highway or if it is possible to extend VPR’s image retrieval paradigm to solve practical issues. They aimed to determine if independently functioning VPR models may benefit from the continuous spatial representations attained by methods like simultaneous localization and mapping (SLAM) and relative pose estimation. They did this in an effort to get around the drawbacks of current VPR techniques and boost localization accuracy.
Densifying the Reference Map
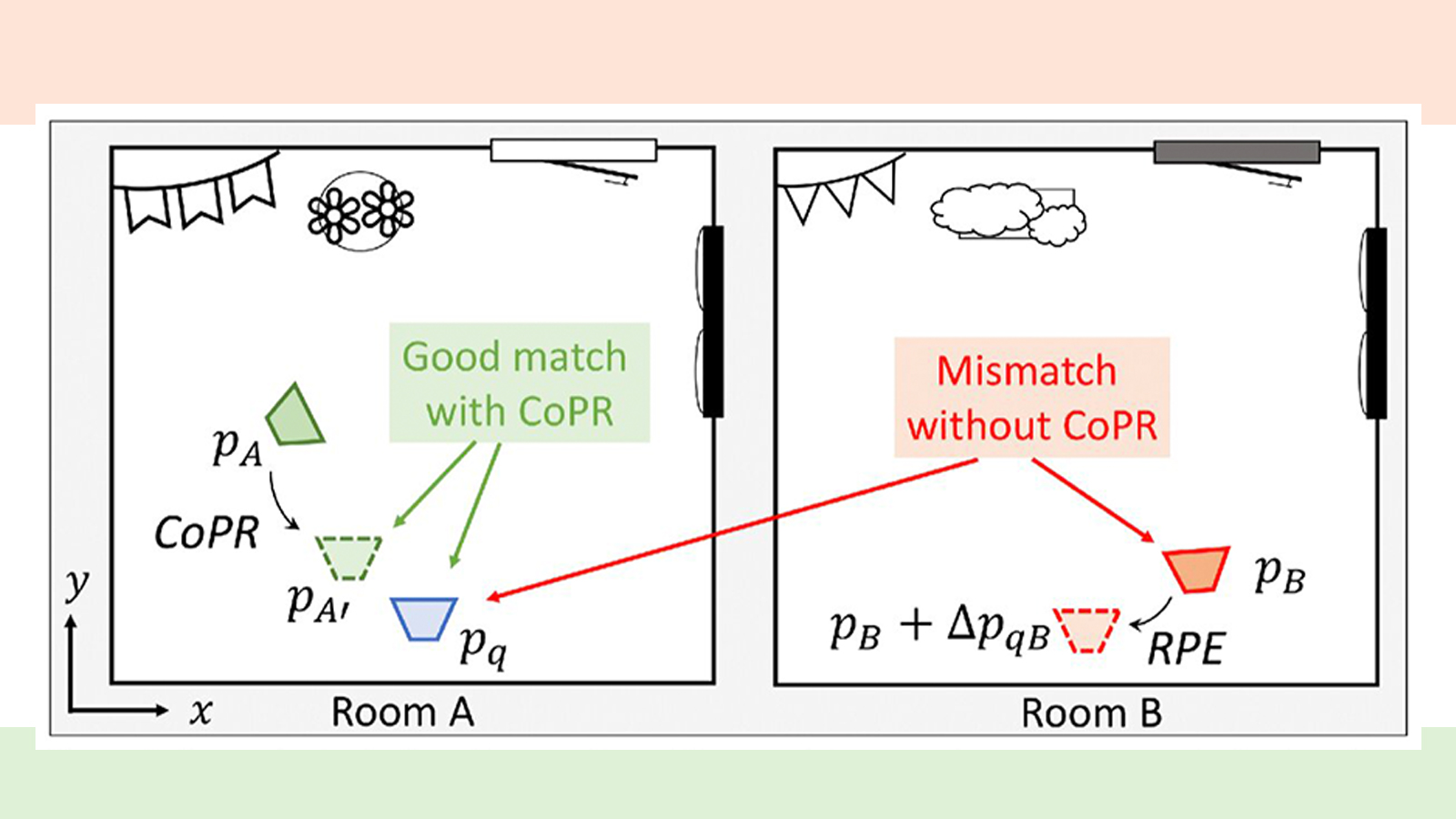
By converting a query image into a single descriptor vector, traditional VPR methods compare it to descriptors that have already been computed for reference images. The reference descriptor that best fits the query image is then found by the model, along with its position and orientation. The TU Delft team suggested a technique to use deep learning models to densify the overall “map” of descriptors. Their method interprets the references as points on a continuous function that connects postures to descriptors rather than treating the descriptors as discrete entities.
Regressing Descriptors for Improved Localization
The researchers estimated descriptors for fresh poses using regression techniques to densify the dataset. They may regress descriptors for unobserved poses by fitting interpolation and extrapolation functions to known reference descriptors. As a result, they were able to expand the reference map and give VPR models more references to choose from when matching query photos. Surprisingly, this method remained computationally effective and did not call for any changes to the VPR models.
Recommended: A Guide on How MLCopilot is Using LLMs & Empowering Developers to Straighten ML Processes
Advantages Over Previous Approaches
The suggested solution by Zaffar and his colleagues avoids this intermediate step, decreasing computational load and omitting unimportant features, in comparison to methods that recreate the scene in the image space to enhance VPR performance. Their method is simpler to scale up because it works directly on the reference descriptors. Furthermore, their approach does not require access to the reference photos themselves, only the reference descriptions and positions. Notably, experiments showed that their descriptor regression approach is most effective when used with a deep learning-based VPR method trained with a loss that accounts for pose similarity.
Complementary Relationship with Relative Pose Estimation
The team found that while tackling various VPR flaws, their strategy and relative pose estimate methodologies had a similar goal. While relative pose estimation can improve the VPR-derived pose estimates, it is unable to correct perceptual aliasing-related discrepancies. However, the proposed method for map densification can assist in locating and averting disastrous mismatches. The two methods can be combined to improve VPR accuracy because they are complementary.
Future Directions
The strategy created by TU Delft researchers has a great deal of potential for enhancing VPR algorithms without adding to the computing strain. This development might be advantageous for VPR-based systems like SLAM and coarse-to-fine localization. The team wants to investigate more sophisticated learning-based interpolation methods that can take into account additional reference characteristics. Their ongoing work includes creating a pre trained map densification network that can adapt to various poses and datasets and offer end users of VPR systems improved results right out of the box.
Conclusion
The continuous place-descriptor regression (CoPR) approach proposed by the researchers at TU Delft offers a promising solution to enhance the performance of deep learning algorithms in VPR applications. To improve the effectiveness of deep learning algorithms in VPR applications, the researchers at TU Delft have suggested the continuous place-descriptor regression (CoPR) method. The method addresses various VPR issues and is a supplement to relative pose estimation approaches. This method has the potential to considerably enhance VPR algorithms and contribute to the broader field of visual localization and mapping with additional study and development.
Source: https://ieeexplore.ieee.org/document/10101676
Next Read: AI Researchers Develop a New Deep Learning-based ENSO Forecasting Model
[To share your insights with us, please write to sghosh@martechseries.com].
Comments are closed.